
SLIDE 1
2/23/09 1
Distributed Algorithms PART III SHARED MEMORY
1 Bertinoro, March 2009
Distributed Algorithms
Part III
Shared memory
- Shared memory distributed system
– Set of processes – Set of shared objects (variables)
- access to a shared variable is a single (indivisible) event
- CommunicaCon through shared variables
– No channels
- We use a single automaton to model the
enCre system
– using several automata and the composiCon
- peraCon leads to some (technical) difficulCes
2
Bertinoro, March 2009
Distributed Algorithms
Part III
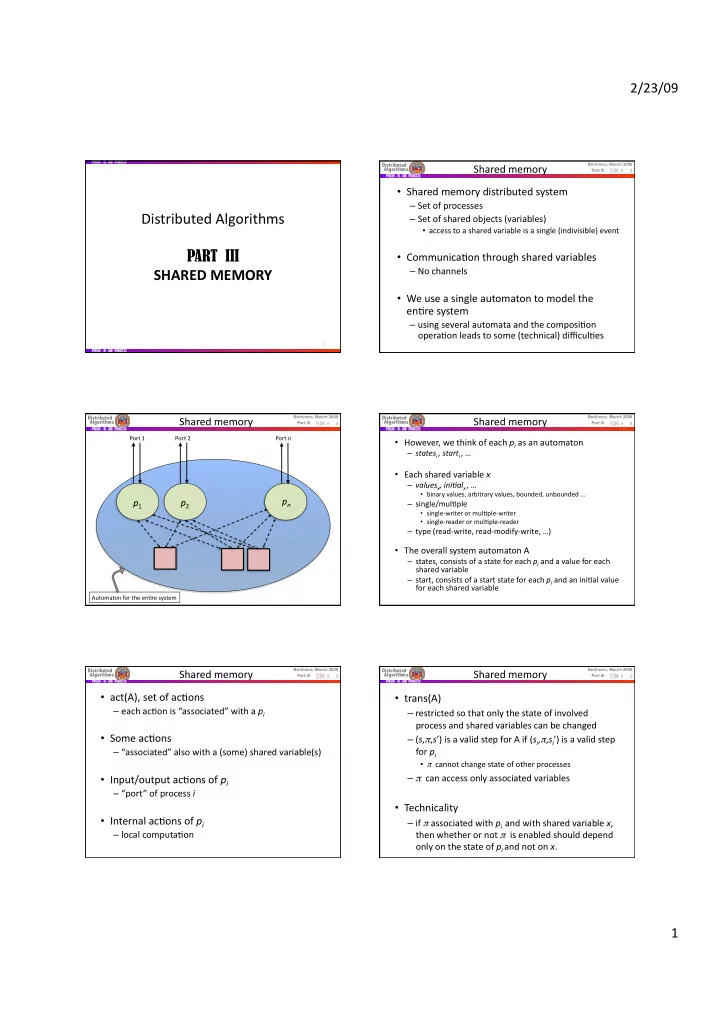
Shared memory
3
p1 p2 pn
Port 1 Port 2 Port n Automaton for the enCre system
Bertinoro, March 2009
Distributed Algorithms
Part III
Shared memory
- However, we think of each pi as an automaton
– statesi , starti , …
- Each shared variable x
– valuesx, ini0alx , …
- binary values, arbitrary values, bounded, unbounded …
– single/mulCple
- single‐writer or mulCple‐writer
- single‐reader or mulCple‐reader
– type (read‐write, read‐modify‐write, …)
- The overall system automaton A
– states, consists of a state for each pi and a value for each shared variable – start, consists of a start state for each pi and an iniCal value for each shared variable
4
Bertinoro, March 2009
Distributed Algorithms
Part III
Shared memory
- act(A), set of acCons
– each acCon is “associated” with a pi
- Some acCons
– “associated” also with a (some) shared variable(s)
- Input/output acCons of pi
– “port” of process i
- Internal acCons of pi
– local computaCon
5
Bertinoro, March 2009
Distributed Algorithms
Part III
Shared memory
- trans(A)
– restricted so that only the state of involved process and shared variables can be changed – (s,π,s’) is a valid step for A if (si,π,si’) is a valid step for pi
- π cannot change state of other processes
– π can access only associated variables
- Technicality
– if π associated with pi and with shared variable x, then whether or not π is enabled should depend
- nly on the state of pi and not on x.
6