
3/4/09 1
Distributed Algorithms PART II ASYNCHRONOUS SYSTEMS
1 Bertinoro, March 2009
Distributed Algorithms
Part II
Asynchronous Systems
- Synchronous
– lock‐step synchrony, rounds
- computa@on and message delivery
- Asynchronous
– we lose the no@on of “@me”
- processes can take any amount of @me in performing
computa@on steps
- channels can take any amount of @me in delivering a
message
- Difficult to deal with
– many impossibility results
2
Bertinoro, March 2009
Distributed Algorithms
Part II
Asynchronous Model
- I/O automaton model
– a very general model for describing asynchronous systems
- Modular descrip@on
– composi@on opera@on
- can combine automata to create larger automaton
- Invariant asser@ons proofs
3
Bertinoro, March 2009
Distributed Algorithms
Part II
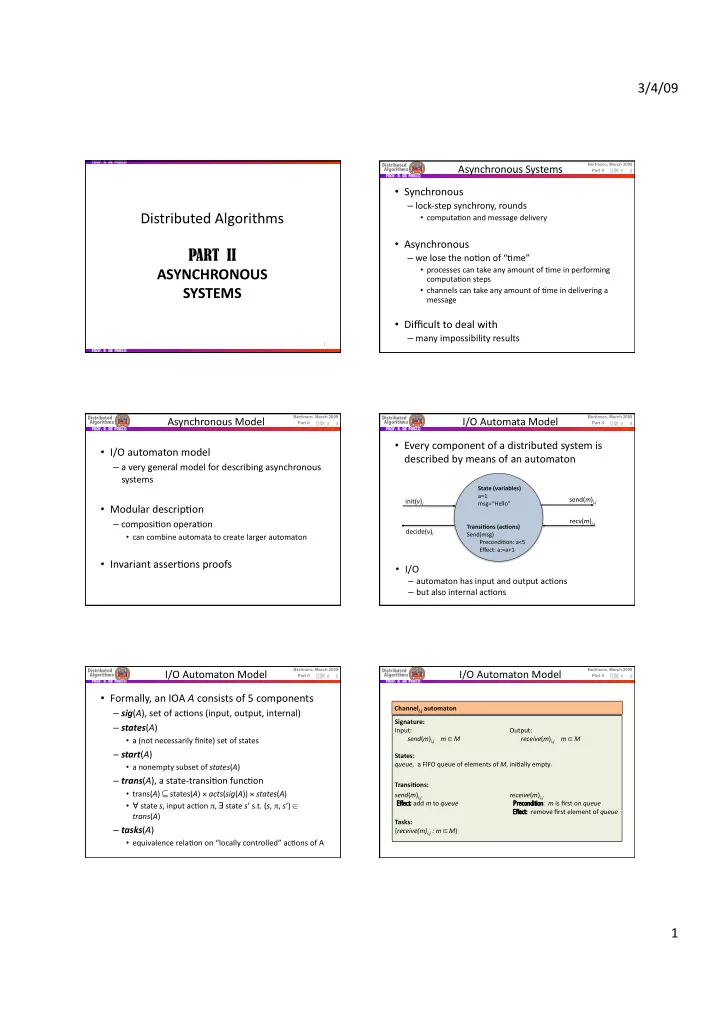
I/O Automata Model
- Every component of a distributed system is
described by means of an automaton
4
- I/O
– automaton has input and output ac@ons – but also internal ac@ons
State (variables) a=1 msg=“Hello” Transi:ons (ac:ons) Send(msg) Precondi@on: a<5 Effect: a:=a+1
init(v)i decide(v)i send(m)i,j recv(m)j,i
Bertinoro, March 2009
Distributed Algorithms
Part II
I/O Automaton Model
- Formally, an IOA A consists of 5 components
– sig(A), set of ac@ons (input, output, internal) – states(A)
- a (not necessarily finite) set of states
– start(A)
- a nonempty subset of states(A)
– trans(A), a state‐transi@on func@on
- trans(A) ⊆ states(A) × acts(sig(A)) × states(A)
- ∀ state s, input ac@on π, ∃ state s’ s.t. (s, π, s’) ∈
trans(A)
– tasks(A)
- equivalence rela@on on “locally controlled” ac@ons of A
5
Bertinoro, March 2009
Distributed Algorithms
Part II
I/O Automaton Model
Signature: Input: Output: send(m)i,j m ∈ M receive(m)i,j m ∈ M States: queue, a FIFO queue of elements of M, ini@ally empty. Transi:ons: send(m)i,j
receive(m)i,j Ef
Effect: fect: add m to queue
Pr
Precondition econdition: m is first on queue Ef Effect: fect: remove first element of queue Tasks: {receive(m)i,j : m ∈ M}
6
Channeli,j automaton