
SLIDE 1
1
CSE-571 Robotics
Rao-Blackwelized Particle Filters for State Estimation
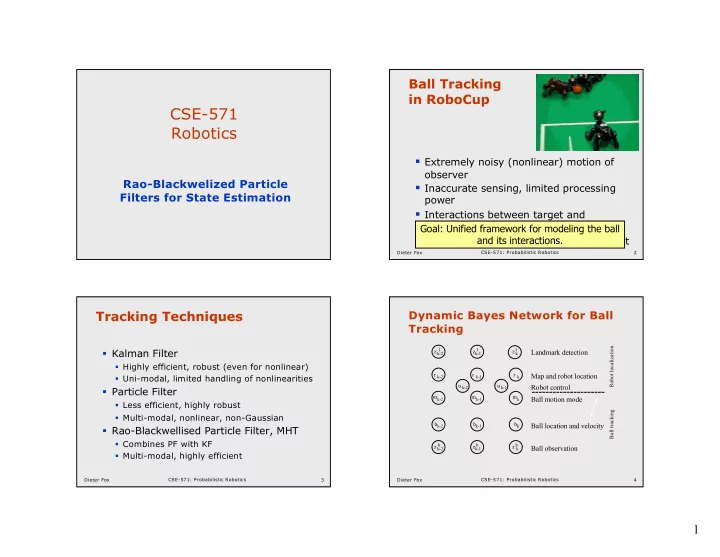
Ball Tracking in RoboCup
§ Extremely noisy (nonlinear) motion of
- bserver
§ Inaccurate sensing, limited processing
power
§ Interactions between target and
environment
§ Interactions between robot(s) and target
Goal: Unified framework for modeling the ball and its interactions.
Dieter Fox 2 CSE-571: Probabilistic Robotics
Tracking Techniques
§ Kalman Filter
§ Highly efficient, robust (even for nonlinear) § Uni-modal, limited handling of nonlinearities
§ Particle Filter
§ Less efficient, highly robust § Multi-modal, nonlinear, non-Gaussian
§ Rao-Blackwellised Particle Filter, MHT
§ Combines PF with KF § Multi-modal, highly efficient
Dieter Fox 3 CSE-571: Probabilistic Robotics
Dynamic Bayes Network for Ball Tracking
k-2
b
k-1
b
k
b r k-2 r k-1 r k z k-2 zk-1 z k u k-2 u k-1 zk-1 zk z k-2
k
m
k-1
m
k-2
m
Ball observation Ball location and velocity Ball motion mode Map and robot location Robot control Landmark detection
Ball tracking Robot localization
l l l b b b Dieter Fox 4 CSE-571: Probabilistic Robotics