
SLIDE 1
1
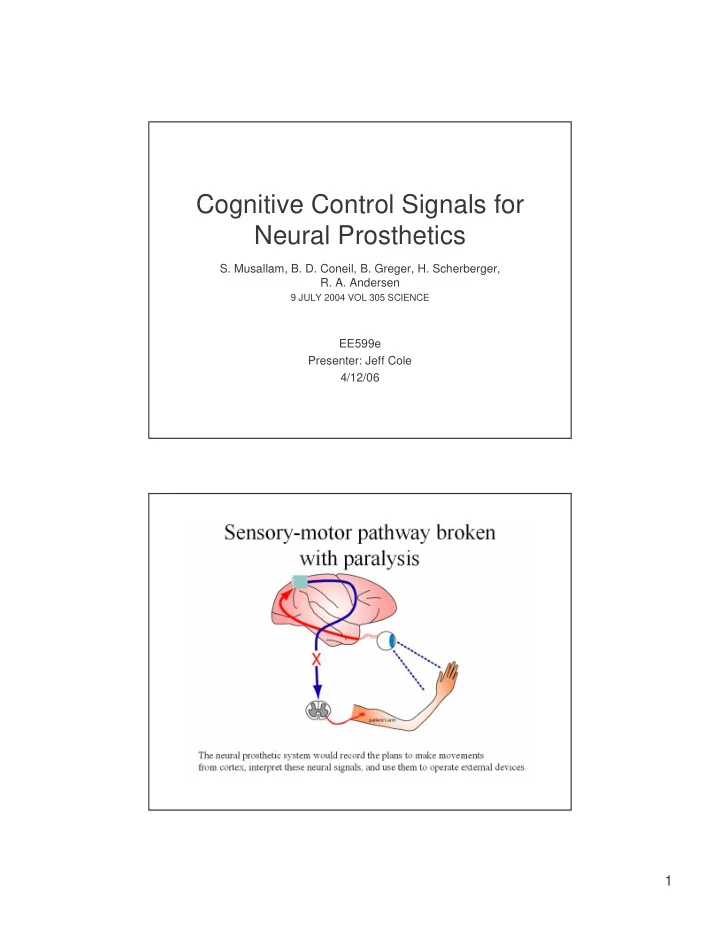
Cognitive Control Signals for Neural Prosthetics
- S. Musallam, B. D. Coneil, B. Greger, H. Scherberger,
- R. A. Andersen
9 JULY 2004 VOL 305 SCIENCE
EE599e Presenter: Jeff Cole 4/12/06