
1
CCD Image Processing: CCD Image Processing: Issues & Solutions Issues & Solutions
[ ] [ ]
, , r x y d x y −
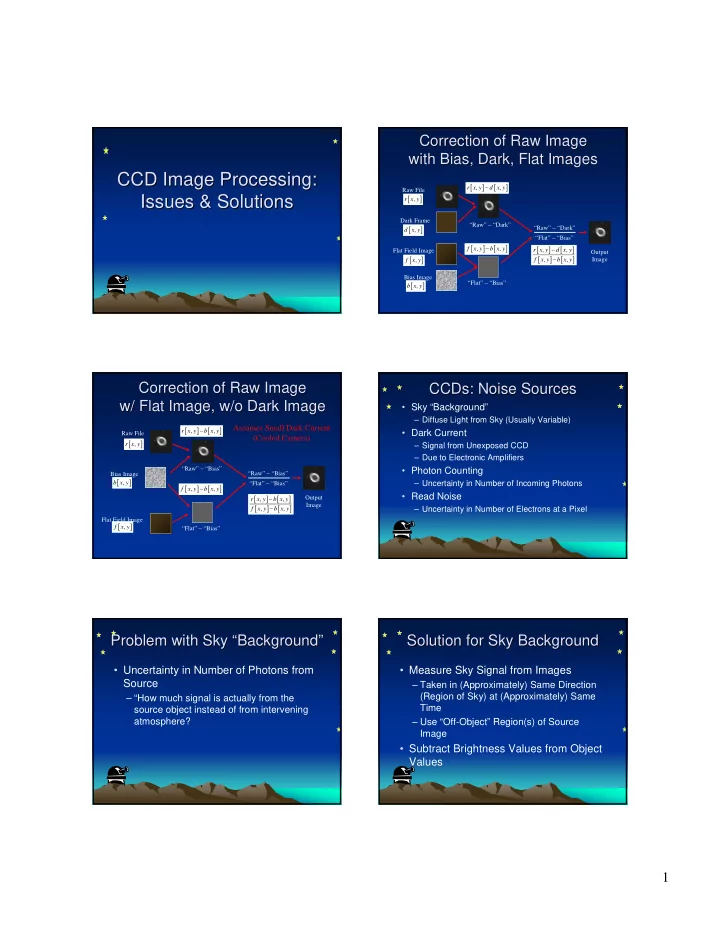
Correction of Raw Image Correction of Raw Image with Bias, Dark, Flat Images with Bias, Dark, Flat Images
Flat Field Image Bias Image Output Image Dark Frame Raw File
[ ]
, r x y
[ ]
, d x y
[ ]
, f x y
[ ]
, b x y
[ ] [ ]
, , f x y b x y − “Flat” − “Bias” “Raw” − “Dark”
[ ] [ ] [ ] [ ]
, , , , r x y d x y f x y b x y − − “Raw” − “Dark” “Flat” − “Bias”
[ ] [ ]
, , r x y b x y −
Correction of Raw Image Correction of Raw Image w/ Flat Image, w/o Dark Image w/ Flat Image, w/o Dark Image
Flat Field Image Bias Image Output Image Raw File
[ ]
, r x y
[ ]
, f x y
[ ]
, b x y
[ ] [ ]
, , f x y b x y − “Flat” − “Bias”
[ ] [ ] [ ] [ ]
, , , , r x y b x y f x y b x y − − “Raw” − “Bias” “Flat” − “Bias” “Raw” − “Bias”
Assumes Small Dark Current (Cooled Camera)
CCDs CCDs: Noise Sources : Noise Sources
- Sky “Background”
– Diffuse Light from Sky (Usually Variable)
- Dark Current
– Signal from Unexposed CCD – Due to Electronic Amplifiers
- Photon Counting
– Uncertainty in Number of Incoming Photons
- Read Noise
– Uncertainty in Number of Electrons at a Pixel
Problem with Sky Problem with Sky “ “Background Background” ”
- Uncertainty in Number of Photons from
Source
– “How much signal is actually from the source object instead of from intervening atmosphere?
Solution for Sky Background Solution for Sky Background
- Measure Sky Signal from Images
– Taken in (Approximately) Same Direction (Region of Sky) at (Approximately) Same Time – Use “Off-Object” Region(s) of Source Image
- Subtract Brightness Values from Object