
SLIDE 1
1
Transition systems, temporal logic, refinement notions
George J. Pappas Departments of ESE and CIS University of Pennsylvania pappasg@ee.upenn.edu
http://www.seas.upenn.edu/~pappasg
DISC Summer School on Modeling and Control of Hybrid Systems Veldhoven, The Netherlands June 23-26, 2003
http://lcewww.et.tudelft.nl/~disc˙hs/
Outline of this mini-course
Lecture 1 : Monday, June 23
Examples of hybrid systems, modeling formalisms
Lecture 2 : Monday, June 23
Transitions systems, temporal logic, refinement notions
Lecture 3 : Tuesday, June 24
Discrete abstractions of hybrid systems for verification
Lecture 4 : Tuesday, June 24
Discrete abstractions of continuous systems for control
Lecture 5 : Thursday, June 26
Bisimilar control systems
Transition Systems
A transition system consists of
A set of states Q A set of events A set of observations O The transition relation The observation map
Initial or final states may be incorporated The sets Q, , and O may be infinite Language of T is all sequences of observations
) O, , Σ, Q, ( T ⋅ → =
- 2
σ 1
q q →
Σ
Σ
q
1
q
2
q
3
q
4
q
- 1
- 2
- 1
- q
=
σ σ σ σ
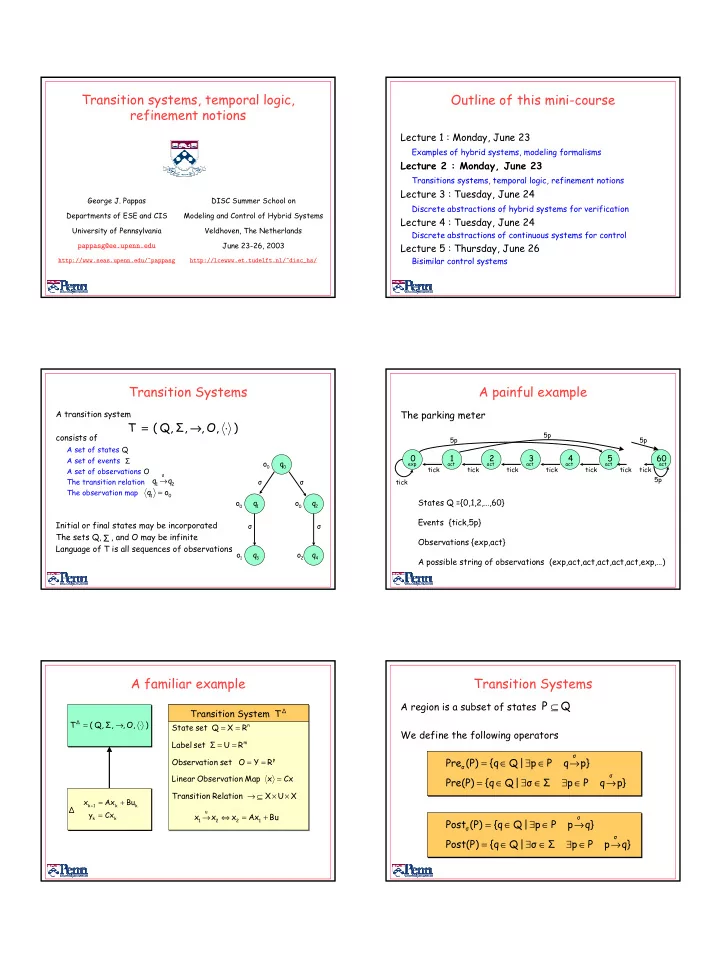
A painful example
The parking meter
1 2 3 60 4 5
tick tick tick tick tick tick tick tick 5p 5p 5p 5p
States Q ={0,1,2,…,60} Events {tick,5p} Observations {exp,act} A possible string of observations (exp,act,act,act,act,act,exp,…)
exp act act act act act act
A familiar example
1
T
∆
k k 1 k
Bu Ax x + =
+ k k
Cx y = ) O, , Σ, Q, ( T∆ ⋅ → =
n
R X Q set State = =
m
R U Σ set Label = =
p
R Y O set n Observatio = = Cx x Map n Observatio Linear = X U X Relation Transition × × ⊆ → Bu Ax x x x
1 2 2 u 1
+ = ⇔ →
∆
T System Transition
Transition Systems
A region is a subset of states We define the following operators
Q P ⊆
p} q P p | Q {q (P) Pre
σ σ
→ ∈ ∃ ∈ = p} q P p Σ σ | Q {q Pre(P)
σ
→ ∈ ∃ ∈ ∃ ∈ = q} p P p | Q {q (P) Post
σ σ
→ ∈ ∃ ∈ = q} p P p Σ σ | Q {q Post(P)
σ