
SLIDE 1
02110
Inge Li Gørtz
- Balanced binary search trees: Red-black trees and 2-3-4 trees
- Amortized analysis
- Dynamic programming
- Network flows
- String matching
- String indexing
- Computational geometry
- Introduction to NP-completeness
- Randomized algorithms
Overview
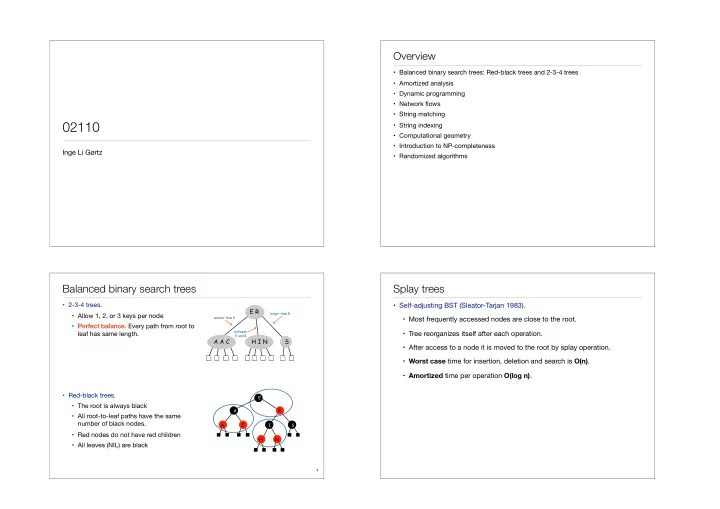
- 2-3-4 trees.
- Allow 1, 2, or 3 keys per node
- Perfect balance. Every path from root to
leaf has same length.
- Red-black trees.
- The root is always black
- All root-to-leaf paths have the same
number of black nodes.
- Red nodes do not have red children
- All leaves (NIL) are black
Balanced binary search trees
3
R H N C A
E I A S
A A C H I N E R S
smaller than E between E and R larger than R
- Self-adjusting BST (Sleator-Tarjan 1983).
- Most frequently accessed nodes are close to the root.
- Tree reorganizes itself after each operation.
- After access to a node it is moved to the root by splay operation.
- Worst case time for insertion, deletion and search is O(n).
- Amortized time per operation O(log n).