
SLIDE 1
Recapitulation: Kalman filter: xk = (r⊤
k , ˙
r⊤
k )⊤, Zk = {zk, Zk−1}
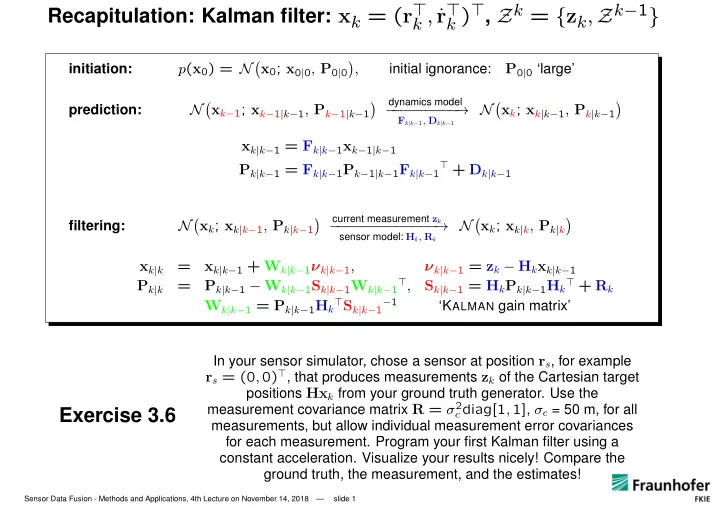
initiation: p(x0) = N
- x0; x0|0, P0|0
- ,
initial ignorance:
P0|0 ‘large’
prediction: Nxk−1; xk−1|k−1, Pk−1|k−1
- dynamics model
− − − − − − − − − →
Fk|k−1, Dk|k−1
Nxk; xk|k−1, Pk|k−1
- xk|k−1 = Fk|k−1xk−1|k−1
Pk|k−1 = Fk|k−1Pk−1|k−1Fk|k−1
⊤ + Dk|k−1
filtering: N
- xk; xk|k−1, Pk|k−1
- current measurement zk
− − − − − − − − − − − − − →
sensor model: Hk, Rk
N
- xk; xk|k, Pk|k
- xk|k
=
xk|k−1 + Wk|k−1νk|k−1, νk|k−1 = zk − Hkxk|k−1 Pk|k
=
Pk|k−1 − Wk|k−1Sk|k−1Wk|k−1⊤, Sk|k−1 = HkPk|k−1Hk⊤ + Rk Wk|k−1 = Pk|k−1Hk⊤Sk|k−1−1
‘KALMAN gain matrix’
Exercise 3.6
In your sensor simulator, chose a sensor at position rs, for example
rs = (0, 0)⊤, that produces measurements zk of the Cartesian target
positions Hxk from your ground truth generator. Use the measurement covariance matrix R = σ2
c diag[1, 1], σc = 50 m, for all
measurements, but allow individual measurement error covariances for each measurement. Program your first Kalman filter using a constant acceleration. Visualize your results nicely! Compare the ground truth, the measurement, and the estimates!
Sensor Data Fusion - Methods and Applications, 4th Lecture on November 14, 2018 — slide 1