
SLIDE 1
1
- G. Ahmadi
ME 639-Turbulence
- G. Ahmadi
ME 639-Turbulence
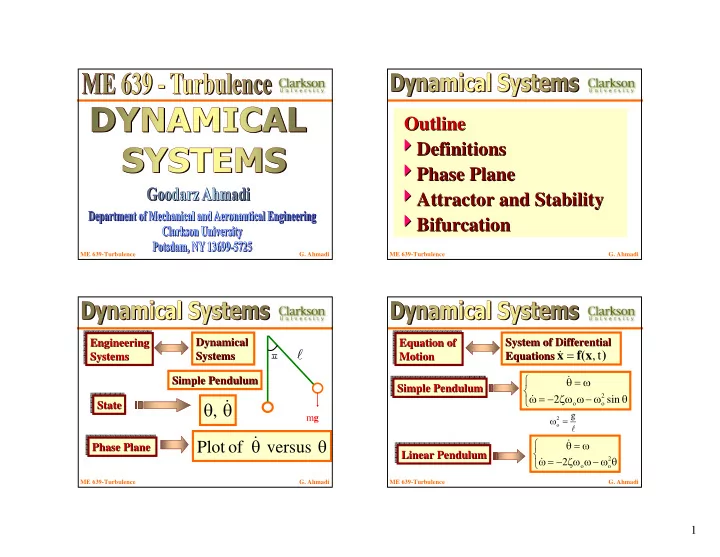
Outline Outline 4 4Definitions Definitions 4 4Phase Plane Phase Plane 4 4Attractor and Stability Attractor and Stability 4 4Bifurcation Bifurcation
- G. Ahmadi
ME 639-Turbulence
Simple Pendulum Simple Pendulum
mg
2
Engineering Systems Engineering Engineering Systems Systems Dynamical Dynamical Systems Systems State State State
θ θ & ,
Phase Plane Phase Plane Phase Plane
θ θ versus
- f
Plot &
l
- G. Ahmadi
ME 639-Turbulence
Simple Pendulum Simple Pendulum Simple Pendulum Equation of Motion Equation of Equation of Motion Motion System of Differential System of Differential Equations Equations
) f(x x t , = &
⎩ ⎨ ⎧ θ ω − ω ζω − = ω ω = θ sin 2
2
- &
&
l g
2
- =
ω
⎩ ⎨ ⎧ θ ω − ω ζω − = ω ω = θ
2
- 2