
SLIDE 1
1
Motion Planning for Finding Evasive Targets in a Cluttered Environment
1
+ Map Building
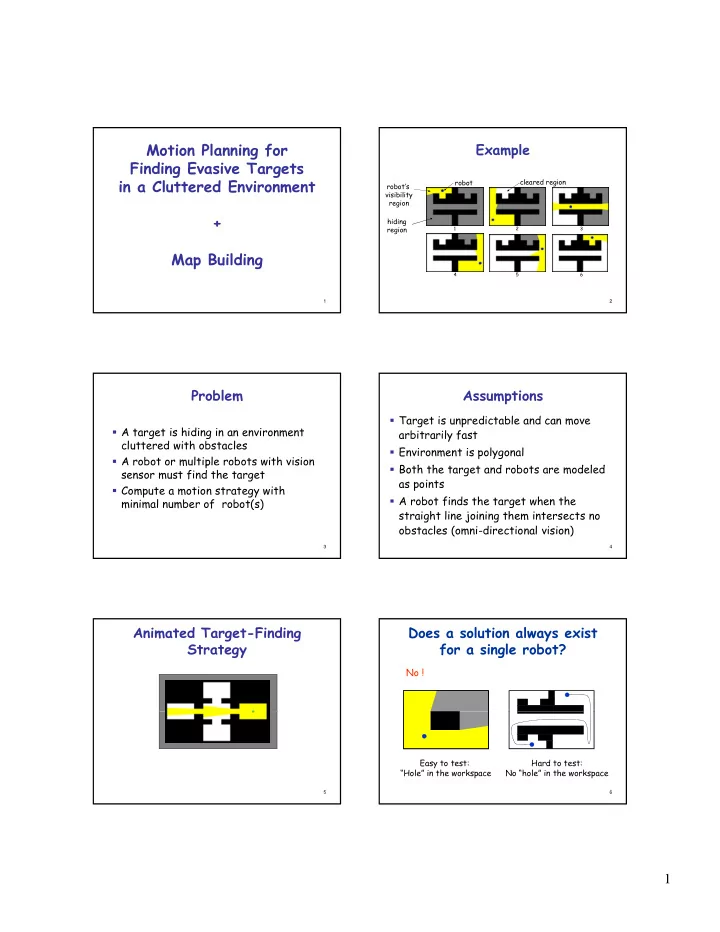
Example
robot’s visibility region hidin cleared region robot
2
hiding region
1 2 3 4 5 6
Problem
A target is hiding in an environment cluttered with obstacles A robot or multiple robots with vision
3
m p sensor must find the target Compute a motion strategy with minimal number of robot(s)
Assumptions
Target is unpredictable and can move arbitrarily fast Environment is polygonal B th th t t d b t d l d
4
Both the target and robots are modeled as points A robot finds the target when the straight line joining them intersects no
- bstacles (omni-directional vision)
Animated Target-Finding Strategy
5
Does a solution always exist for a single robot?
No !
6