
SLIDE 1
Lecture 12: Planning algorithms
- Prof. Julia Hockenmaier
juliahmr@illinois.edu
- http://cs.illinois.edu/fa11/cs440
- CS440/ECE448: Intro to Artificial Intelligence
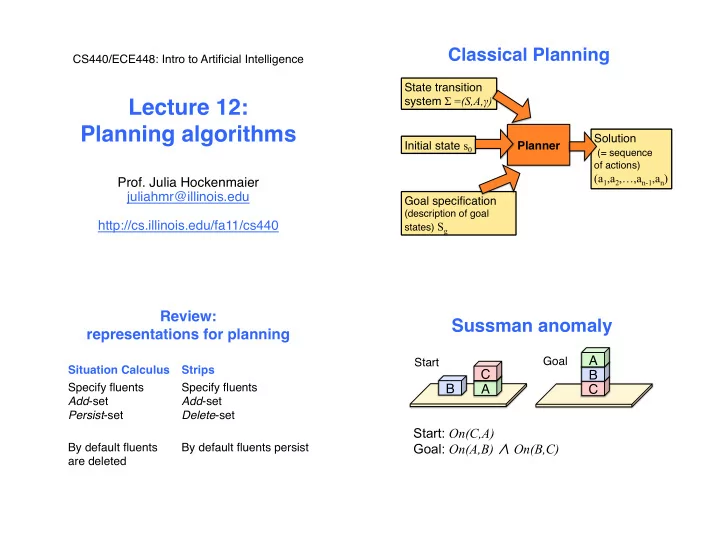
State transition system ! =(S,A,!)
Classical Planning
Planner Solution (= sequence
- f actions)
(a1,a2,…,an-1,an) Initial state s0 Goal specification
(description of goal states) Sg
Operators
- Review:
representations for planning
Situation Calculus Strips Specify fluents Add-set Persist-set
- Specify fluents