
SLIDE 1
1
From O(n α(n)) to O(n α*(n)) Recent Results for Splay Trees
Joan M. Lucas The College at Brockport State University of New York Western New York Theory Day May 2, 2008
Based on: “Splay Trees, Davenport-Schinzel Sequences, and the Deque Conjecture”, Seth Pettie, SODA, January 2008
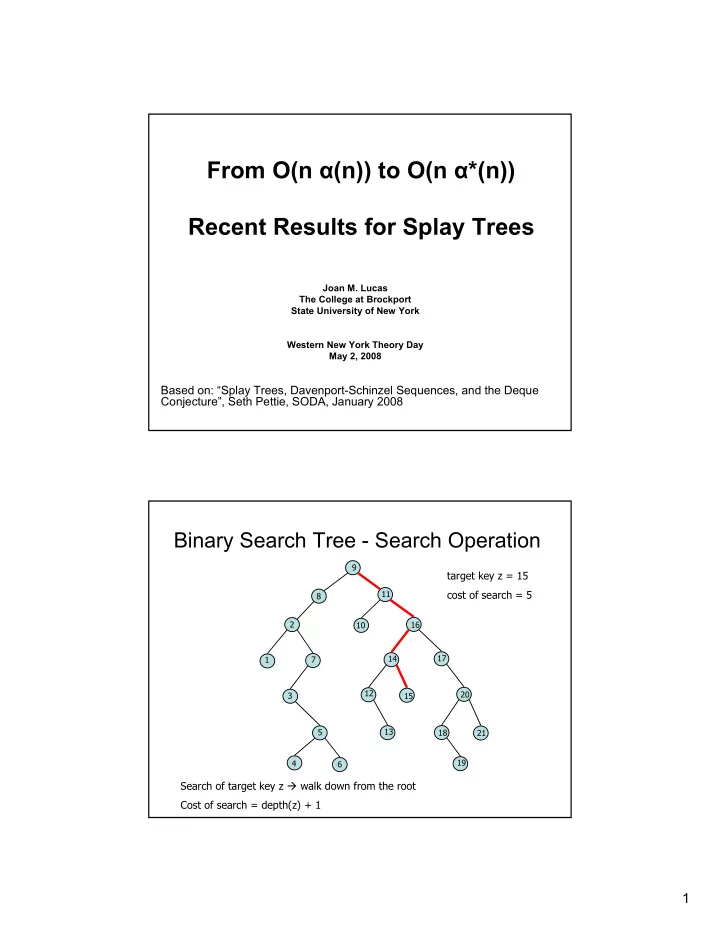
Binary Search Tree - Search Operation
1 4 3 5 7 6 2 13 12 11 10 9 8 21 20 18 17 16 15 14 19
Search of target key z walk down from the root Cost of search = depth(z) + 1 target key z = 15 cost of search = 5