
1
1
Edge Detection
l Why Detect Edges?
u Information reduction
l Replace image by a cartoon in which objects and surface markings are
- utlined ⇒ create line drawing description
l These are the most informative parts of the image
u Biological plausibility
l Initial stages of mammalian vision systems involve detection of edges
and local features
u Applications
l Object recognition, stereo, texture analysis, motion analysis, image
enhancement, image compression
2
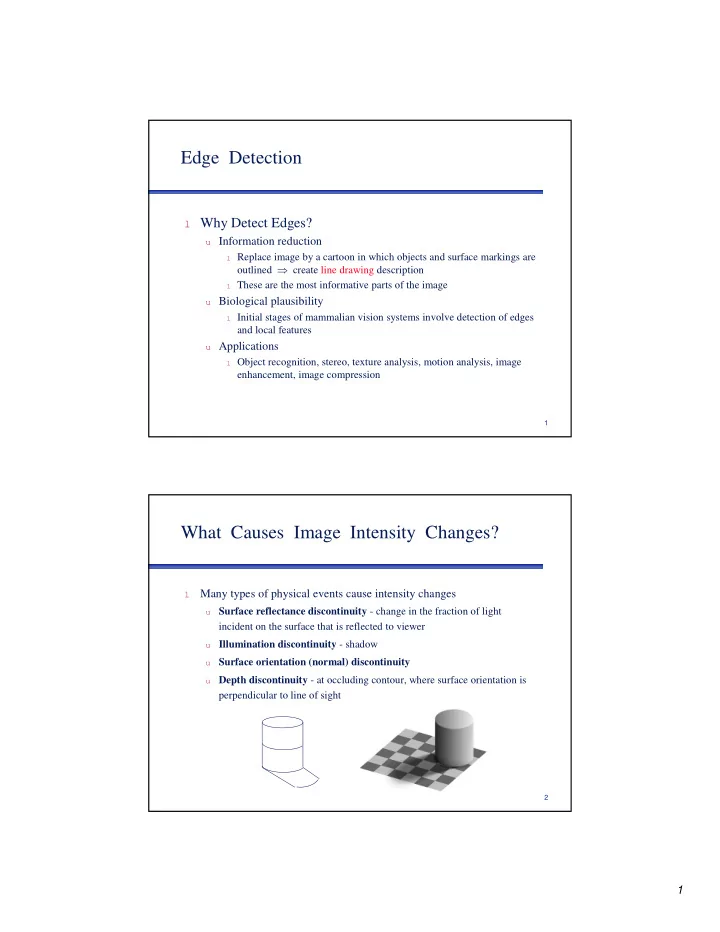
What Causes Image Intensity Changes?
l
Many types of physical events cause intensity changes
u Surface reflectance discontinuity - change in the fraction of light
incident on the surface that is reflected to viewer
u Illumination discontinuity - shadow u Surface orientation (normal) discontinuity u Depth discontinuity - at occluding contour, where surface orientation is
perpendicular to line of sight