
SLIDE 1
CSE-571 Probabilistic Robotics
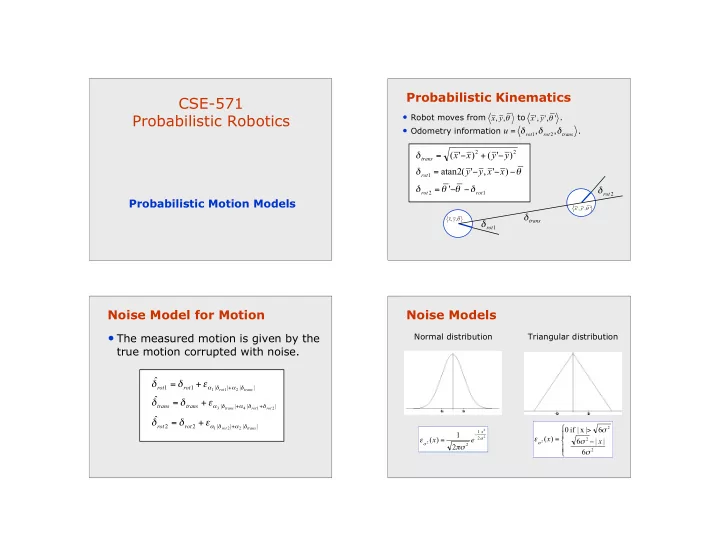
Probabilistic Motion Models
Probabilistic Kinematics
2 2
) ' ( ) ' ( y y x x
trans
- +
- =
- =
) ' , ' ( atan2
1
x x y y
rot 1 2
'
rot rot
- =
- Robot moves from to .
- Odometry information .
- ,
, y x ' , ' , '
- y
x
trans rot rot
u
- ,
,
2 1
=
trans
- 1
rot
- 2
rot
- ,
, y x ' , ' , '
- y
x
Noise Model for Motion
- The measured motion is given by the
true motion corrupted with noise.
| | | | 1 1
2 1 1
ˆ
trans rot
rot rot
- +
+ =
| | | | 2 2
2 2 1
ˆ
trans rot
rot rot
- +
+ =
| | | |
2 1 4 3
ˆ
rot rot trans
trans trans
- +
+
+ =
Noise Models
2 2 2
2 1 2
2 1 ) (
- x
e x
- =
- >
=
2 2 2
6 | | 6 6 | x | if ) (
2
- x