
SLIDE 1
Zhenyu Ye, Eindhoven University of Technology and Connecterra BV Henk Corporaal, Eindhoven University of Technology Pieter Jonker, Delft University of Technology Henk Nijmeijer, Eindhoven University of Technology
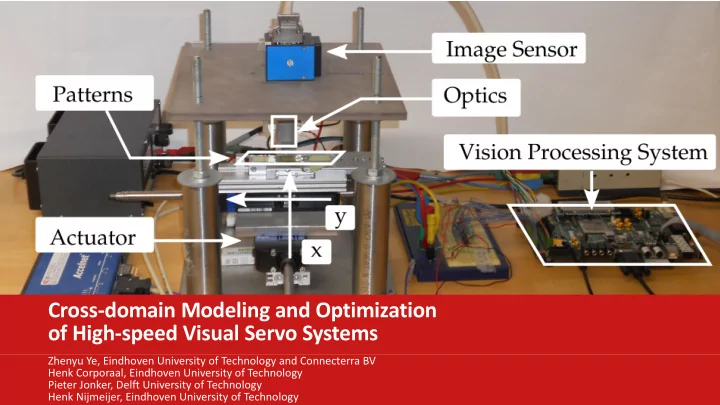
Cross-domain Modeling and Optimization
- f High-speed Visual Servo Systems