
SLIDE 1
1
1
Leo Joskowicz, Spring 2005 Leo Joskowicz, Spring 2005
CG Lecture 1 CG Lecture 1
Convex Hull Algorithms
- 2D
- Basic facts
- Algorithms: Naïve, Gift wrapping, Graham scan, Quick hull,
Divide-and-conquer
- Lower bound
- 3D
- Basic facts
- Algorithms: Gift wrapping, Divide and conquer, incremental
- Convex hulls in higher dimensions
2
Leo Joskowicz, Spring 2005 Leo Joskowicz, Spring 2005
Convex hull: basic facts Convex hull: basic facts
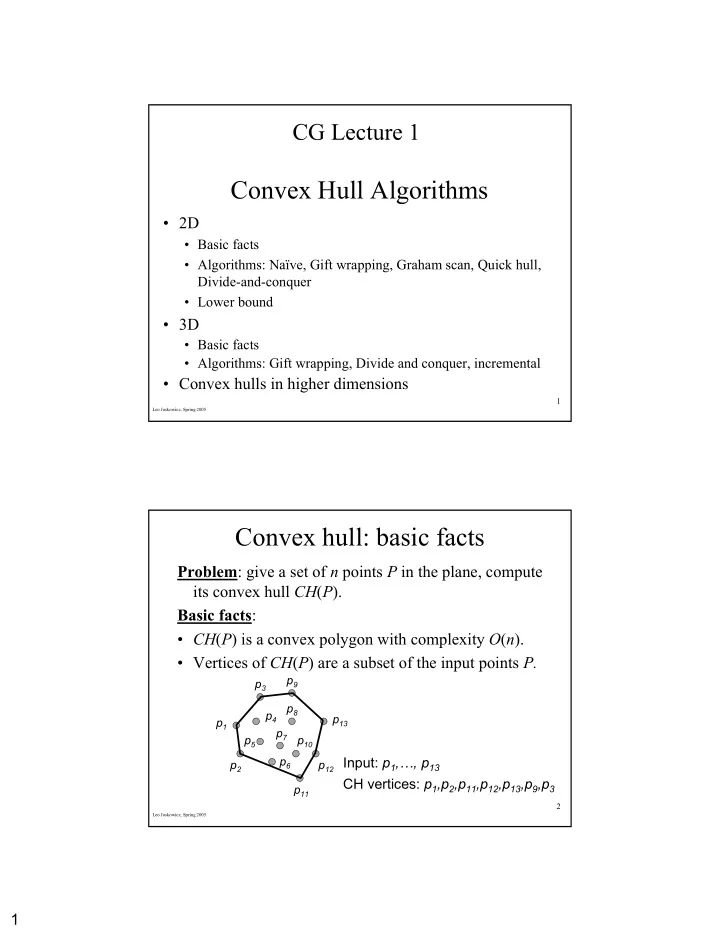
Problem: give a set of n points P in the plane, compute its convex hull CH(P). Basic facts:
- CH(P) is a convex polygon with complexity O(n).
- Vertices of CH(P) are a subset of the input points P.
Input: Input: p1,…, p13 CH vertices: CH vertices: p1,p2,p11,p12,p13,p9,p3
p9 p3 p1 p11 p2 p12 p13 p8 p4 p5 p7 p10 p6