
SLIDE 1
1
20070308 chap2 1
Chapter2
Intelligent Agents
20070308 chap2
2
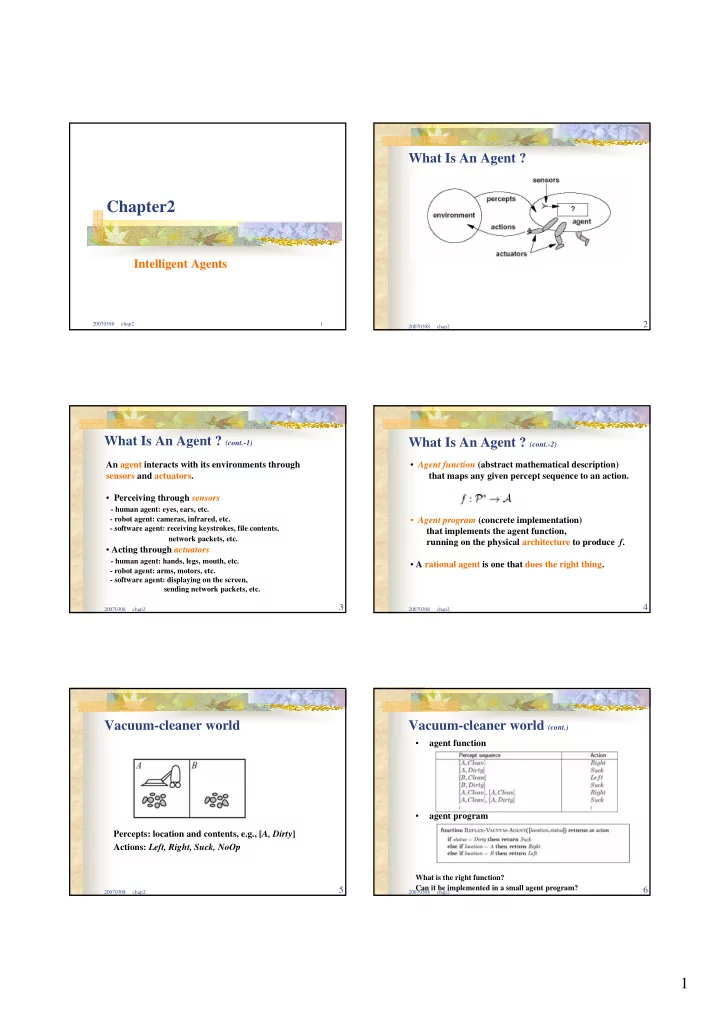
What Is An Agent ?
20070308 chap2
3
What Is An Agent ? (cont.-1)
An agent interacts with its environments through sensors and actuators.
- Perceiving through sensors
- human agent: eyes, ears, etc.
- robot agent: cameras, infrared, etc.
- software agent: receiving keystrokes, file contents,
network packets, etc.
- Acting through actuators
- human agent: hands, legs, mouth, etc.
- robot agent: arms, motors, etc.
- software agent: displaying on the screen,
sending network packets, etc.
20070308 chap2
4
- Agent function (abstract mathematical description)
that maps any given percept sequence to an action.
- Agent program (concrete implementation)
that implements the agent function, running on the physical architecture to produce f.
- A rational agent is one that does the right thing.
What Is An Agent ? (cont.-2)
20070308 chap2
5
Vacuum-cleaner world
Percepts: location and contents, e.g., [A, Dirty] Actions: Left, Right, Suck, NoOp
20070308 chap2
6
- agent function
- agent program
What is the right function? Can it be implemented in a small agent program?